
Моделирование и использование тактильных ощущений в современных ИС
Содержание:

Введение
Попытаемся определить, чем обоснован интерес к изучению тактильного взаимодействия в проектировании пользовательского опыта. В конце концов, разве это не визуальное направление деятельности, что наиболее заметно и справедливо в отношении любого конкретного интерфейса? Что касается отображения данных и обратной связи, чаще всего дело обстоит именно так: в роли пользователей мы рассчитываем сначала увидеть доступные нам элементы управления и опции интерактивной системы, прежде чем начнем с ними взаимодействовать. Мы, вероятно, также ожидаем, что сможем видеть результаты любых действий, предпринятых нами. Проектирование интерфейсов уже давно восприняло идею предложения дополнительных методов подкрепления там, где это возможно, с особым упором на слуховую обратную связь. Таким образом, каждое конкретное действие обычно подкреплено сочетанием визуального и аудиального фидбеков.
Более того: на постоянно расширяющемся рынке музыкального и звукового программного обеспечения обратная связь в любом случае может быть в основном слуховой и выражаться аудио-сигналами. Эта, несомненно, мощная комбинация обеспечивает богатые формы отображения информации, но взаимодействие, которое переводит нас от одного этапа деятельности к другому, обычно обеспечивается прикосновением.
Способ, которым мы выбираем различные физические и виртуальные объекты, а затем манипулируем ими, будет состоять из комбинации движения и касания, или гаптического взаимодействия (Haptic Interaction). Вероятно, с этого момента и начинаются интересные вещи: уже накоплен значительный объем результатов исследований по дизайну интерфейсов с точки зрения визуальной и слуховой обратной связи, но проектировщикам все еще очень мало известно о специфике проектирования интерактивных систем, предназначенных для тактильного взаимодействия. И первый ответ на наш вступительный вопрос может заключаться в том, что интеракция через прикосновение, вероятно, недооценивается с точки зрения потенциального источника обратной связи, предлагаемого ею. Возможно, что основное внимание разработчиков было чрезмерно прочно зафиксировано на «выполнении [задачи]», а не на «получении [обратной связи]». Таким образом, в мире, где визуальные дисплеи уже и без того загромождены данными, «выгрузка» некоторой части этой информации на слуховой канал способна принести реальную пользу, но также может оказаться, что некоторые из этих обратных связей являются более значимыми для нашего осязания. Например, действие выбора и позиционирования виртуального экранного регулятора громкости куда проще осуществить при помощи чувства осязания, чем слуха.
Все пользователи сотовых телефонов знакомы с тактильной технологией. Эта технология обогащает компьютерные игры, устройства с сенсорными экранами и портативную электронную технику функциями, которые повышают уровень восприятия пользователя.
Система, в которой реализована такая технология, обеспечивает обратную связь с пользователем через его тактильные ощущения, или осязание.
Первые тренажерные системы с функцией осязания появились в авиации. Они имитировали вибрации в рычаге переключения передач в тех случаях, когда потеря скорости становилась неминуемой. В дальнейшем эта обратная связь использовалась в реальных условиях, однако с усовершенствованием систем управления соответствующие сигналы появлялись уже на панели.
В последние годы тактильные технологии стали популярны в исследованиях, посвященных проблемам искусственного интеллекта и виртуальной реальности. Чувство осязания оказывается важнейшим компонентом для воссоздания виртуальной среды, которая должна вызывать полную иллюзию реальности. Тактильные системы появились и в электронном оборудовании. Устройства, которые позволяют ощущать объекты виртуальной среды, используются в раскопках, строительстве, образовании и даже в удаленной медицине.
Тактильные технологии применяются также в сотовых телефонах для того, чтобы, например, не тревожа окружающих, пользователь мог своевременно получить сообщение. В играх с помощью этой функции игрок получает предупреждение, например, о том, что его автомобиль съехал на обочину или к персонажу подкрался злодей. Эта функция реализуется на основе исполнительного механизма, управляемого контроллером.
Давайте рассмотрим принцип действия этой технологии. По сути, на сегодняшнем рынке представлены два типа тактильных технологий, основанных на использовании привода. Каждая технология имеет свои преимущества и недостатки, а также свою уникальность.
Вращающийся эксцентрический маховик
Вращающийся эксцентрический маховик (ВЭМ) — самая старая тактильная технология на рынке (см. рис. 1). Устройство с тактильной функцией состоит из маховика со смещенной осью, который при вращении создает всенаправленные вибрации. Эти колебания возникают в сотовом телефоне в режиме виброзвонка.
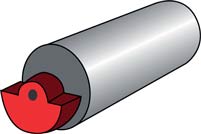
Конструкция привода с вращающимся эксцентрическим маховиком
К сожалению, конструкция ВЭМ ограничивает его способность создавать сложные профили сигналов. Частота и амплитуда каждого сигнала зависят от входного управляющего напряжения, поэтому создание различных эффектов осуществляется с помощью только одной переменной. Разные сочетания амплитуды вибраций и их частоты представляют собой довольно-таки ограниченный набор возможностей.
Запуск двигателя, управление им и последовательная остановка по одним и тем же линиям осуществляются гораздо труднее по сравнению с более новыми технологиями. Таким образом, ВЭМ не годится для использования в тех приложениях, где требуется высокая скорость и малое время отклика. Преимущество этой технологии — в относительно малой стоимости ее реализации.
для реализации более современной тактильной технологии используется линейный резонансный привод (ЛРП). Он представляет собой электромагнит с обмоткой и прикрепленной к нему пружиной
Линейный резонансный привод
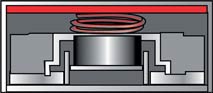
Под действием управляющего тока электромагнит совершает линейные колебания. На резонансной частоте привод потребляет минимальную мощность, которая на 30% меньше расхода мощности ВЭМ. При этом, однако, механизм вынужден работать исключительно на резонансной частоте. Эффективность и параметры устройства заметно ухудшаются при уходе его рабочей частоты от резонансного значения. Это обстоятельство необходимо учесть разработчикам, т.к. жесткость пружины меняется в результате износа, изменения температуры или других факторов окружающей среды.
Модулируя амплитуду входного сигнала, можно создавать такие уникальные профили, которые не обеспечивает применение ВЭМ. У ЛРП лучшее, чем у ВЭМ, время отклика, и потому линейные резонансные приводы могут использоваться в текстовых приложениях сотовых телефонов для сопровождения букв, набранных с помощью кнопок, соответствующим сигналом.
Существует и другой тип привода, отличный от двух описанных выше. Он не основан на использовании микромотора, характеризуется быстрым временем отклика и высокой энергоэффективностью. Кроме того, его размеры меньше, чем у ЛРП и ВЭМ.
Пьезоэлектрические приводы
Принцип действия, пьезоэлектрического привода основан на изменении формы пьезоэлектрического материала при приложении электрического напряжения. Пьезоэлектрический-керамический элемент производит механическую энергию в ответ на электрические сигналы и, наоборот, способен производить электрические сигналы в ответ на механическое воздействие.

Эти приводы используются уже много лет. Они состоят из пленки — датчика, который преобразует электрическое напряжение в механические колебания. Эти датчики применяются также в системах сбора энергии и в динамиках.
В состав пьезопривода входит тонкая полоска или круглый диск пьезоэлемента, которые под действием электрического напряжения изгибаются, создавая колебания (см. рис. 3). Концы полоски прикрепляются к сенсорному экрану, а ее центральная часть — к корпусу устройства. Сенсорный экран установлен в корпусе таким образом, что возникающие колебания преимущественно распространяются по поверхности экрана. При использовании этой технологии большая часть вибраций ощущается только на экране, а не в остальной части устройства.
Пьезоэлектрическая технология не имеет ограничения по частоте или амплитуде, позволяя разработчику создавать такие профили сигнала, которые недостижимы при использовании ЛРП или ВЭМ. Пьезоэлектрический привод в максимальной мере позволяет имитировать тактильную обратную связь при нажатии механической кнопки.
С помощью нескольких пьезомодулей можно создать сенсорный экран с отдельными вибрирующими зонами. При этом, например, каждая отдельная зона емкостного экрана обеспечит индивидуальную вибрацию для каждого прикасающегося пальца руки.
Одним из недостатков пьезопривода является большой размах управляющего напряжения (Vp-p) — 100–200 В. Использование нескольких многослойных пьезоприводов позволяет уменьшить эту величину до 50 В, однако такие устройства стоят очень дорого.
На рисунке 4 демонстрируются преимущества использования пьезопривода перед ЛРП и ВЭМ, на запуск которых требуется 30–60 мс, тогда как время отклика пьезопривода, как правило, составляет менее 2 мс. Таким образом, пьезоприводы намного энергоэффективнее по сравнению с ЛРП и ВЭМ.
Преимущества пьезопривода определяются также использованием драйверов, специально разработанных для этих устройств. Например, напряжение Vp-p драйвера DRV8662 от TI с внутренним повышающим преобразователем составляет 200 В, время запуска — 1,5 мс. Такие параметры позволяют применять этот драйвер во всех современных тактильных системах. Входная цепь устройства, на который подается напряжение питания 3–5,5 В, может быть несимметричной или дифференциальной.
Пьезопривод занимает малое место на печатной плате, а также не требует использования трансформатора за счет встроенного выключателя электропитания и диода, что уменьшает размеры и стоимость всей системы. Таким образом, пьезотактильная технология получает все большее распространение в современных устройствах, расширяя возможности пользовательского интерфейса
Источники:
https://lpgenerator.ru/blog/2018/03/24/glava-17-putevoditel-po-cheloveko-kompyuternomu-vzaimodejstviyu-taktilnaya-interakciya/
http://www.russianelectronics.ru/leader-r/review/8602/doc/57715/
https://findpatent.ru/patent/156/1563963.html
http://www.rusnanonet.ru/download/equipment/eurotek_pi2.pdf

- Компьютерная графика. Спецэффекты.
- «Время строит аэропланы». История отечественного тайм-менеджмента. (История отечественного тайм-менеджмента)
- Программные продукты для дизайнеров
- Российская Федерация – правовое государство
- Гражданско-процессуальная правоспособность и дееспособность иностранных граждан на территории Российской Федерации (Гражданская правоспособность иностранных граждан и лиц без гражданства.)
- Система источников и их характеристика в международном гражданско-процессуальном праве
- Структура и функции федеральных исполнительных органов власти Российской Федерации (Структура федеральных органов исполнительной власти)
- Недобросовестная конкуренция и ее виды.
- Право граждан на юридическую помощь.
- Служба бронирования
- Время строит аэропланы». История отечественного тайм-менеджмента
- Служба бронирования (типы)