
Виды связей в теоретической механике - формулы и определения с примерами
Содержание:
Виды связей:
В зависимости от характера закрепления тела встречаются различные виды связей (рис. 21). На этом рисунке применяются еле-, дующие обозначения: А — тело, В — связь, R— реакция связи, 
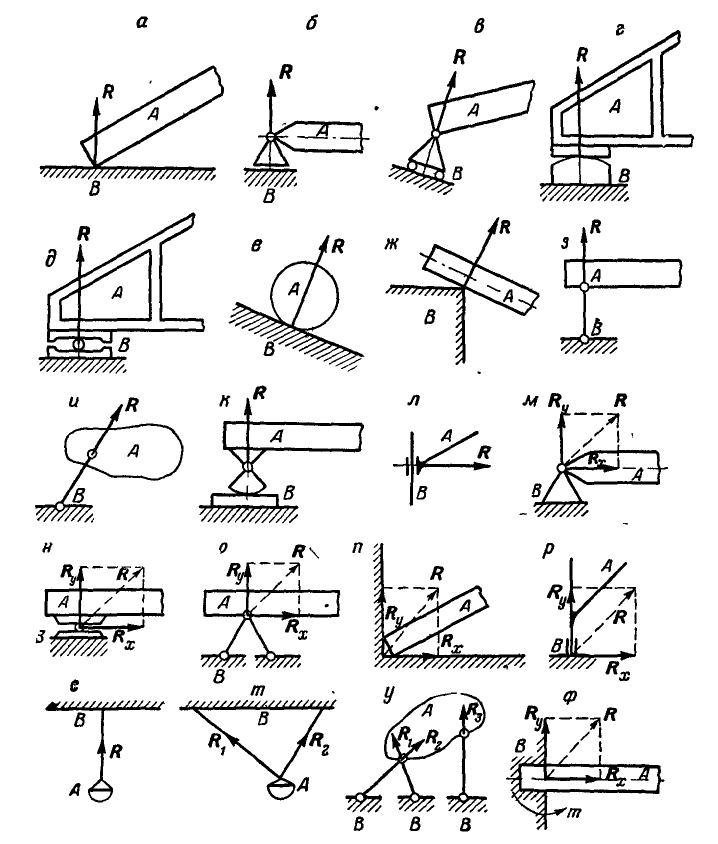
Рис. 21.
Подвижные опоры
Подвижные опоры (рис. 21, а — л). Эта категория связей допускает возможность некоторого перемещения тела по отношению к связи. Предполагая, что тело не может отделиться от связи и что между ними отсутствуют силы трения, заключаем, что эти связи могут быть заменены одной реактивной силой, направленной перпендикулярно к направлению возможного смещения тела по отношению к связи.
Подвижные опоры могут быть трех видов: подвижно-шарнирные (рис. 21, а — ж), качающиеся (рис. 21, з — к), скользящая опора-штанга (рис. 21, л).
Шарниром называется такое соединение двух тел, которое допускает возможность поворота одного тела по отношению к другому.
Неподвижно-шарнирные опоры
Неподвижно-шарнирные опоры (рис. 21, м—р). Эти опоры, допуская возможность некоторого поворота тела в плоскости чертежа по отношению к связи, не допускают смещения тела по связи. Здесь, вообще говоря, возникает в шарнире одна неизвестная по направлению реактивная сила R, которую при решении задач следует представлять в виде двух составляющих — горизонтальной  и вертикальной
и вертикальной  .
.
На рисунке 21 указаны три вида неподвижно-шарнирных опор: неподвижные шарниры (рис. 21, м—о), угол (поперечными размерами стержня пренебрегаем) (рис. 21, n), цапфа-подпятник (рис. 21, р).
Гибкие и стержневые связи
Гибкие и стержневые связи (рис. 21, с—у). К гибким связям (рис. 21, с и m) относятся тросы, канаты, нити и пр. Стержневые связи (рис. 21, у) осуществляются при помощи невесомых стержней, имеющих шарнирное соединение по концам.
Отличие гибкой связи от стержневой состоит в том, что последняя препятствует перемещению тела вдоль связи (стержня) в обоих направлениях, тогда как гибкая связь препятствует перемещению тела вдоль связи в одном направлении, т. е. гибкие связи могут работать лишь на растяжение.
Однако в обоих случаях реакции связей всегда направлены по направлению самих связей, а число их равно числу связей.
Жесткая заделка
Жесткая заделка (рис. 21, ф). Такой вид связи по сравнению с неподвижным шарниром налагает еще одно ограничение на тело, а именно — невозможность поворота тела по отношению к связи. Поэтому здесь, кроме двух составляющих  и
и  реакции
реакции  необходимо ввести еще реактивный момент m.
необходимо ввести еще реактивный момент m.
Связи и реакции связей
Связью называют ограничение, стесняющее движения материальной точки или механической системы, осуществляемое другими материальными объектами
Связь. Всякую точку M (х, у, z) называют свободной точкой, если ее возможно переместить, дав ее координатам х, у и z малые приращения δx, бy, бz произвольного знака и величины, и никакие другие тела не препятствуют этому перемещению точки М. Свободная точка обладает тремя степенями свободы. Точку называют несвободной, если ее перемещение ограничено какими-либо условиями и ей нельзя сообщить любое движение. Ограничения, стесняющие движение точки, называют связями. Связи всегда осуществляются посредством других материальных тел и могут ограничивать не только перемещения, но и вообще движение (например, могут ограничивать скорости) точек. Со связями, наложенными на скорости, мы познакомимся в динамике (см. № 52).
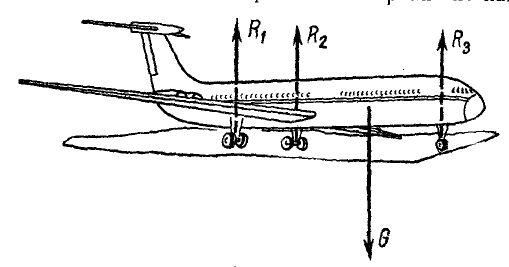
Рис. 6
Связи могут быть наложены не только на отдельные точки, но и на системы точек, и на твердые тела. Итак связью называют ограничение, стесняющее движение материальной точки или механической системы и осуществляемое другими материальными объектами. Твердое тело, движение которого не ограничено связями, называют свободным твердым телом, а твердое тело, движение которого ограничено связями,— несвободным твердым телом. Свободное твердое тело имеет шесть степеней свободы. Чтобы получить произвольное малое перемещение твердого тела, достаточно сообщить три малых перемещения, параллельных трем осям координат, и повернуть его на три малых угла вокруг этих трех осей. Так, например, летящий в воздухе самолет является свободным телом, а самолет, стоящий на аэродроме,— несвободным, так как на него наложена связь (условие: z = const). Он не может опуститься ниже площадки аэродрома и даже подняться, не нарушив при этом своей связи с аэродромом, и повернуть самолет на аэродром можно только вокруг вертикальной оси Oz. Эта связь, действующая (или, как говорят, наложенная) на самолет, осуществляется при помощи другого материального объекта (площадки аэродрома).
Реакцией связи называют силу, с которой действует на данную материальную точку или механическую систему тело, осуществляющее связь.
Реакция связи
Если тело стремится переместиться в направлении связи и тем самым действует на связь, то со стороны связи возникает противодействие. Силу, с которой тело, осуществляющее связь, действует на тело, на которое связь наложена, называют реакцией связи.
Изучая движение или покой тела, надо учитывать все силы, действующие на это тело, не исключая и реакций связей.
По закону равенства действия и противодействия реакция связи равна той силе, с которой данное тело действует на связь, но направлена в противоположную сторону. Так, например, на самолет, стоящий на аэродроме (рис. 6), действует его вес (активная сила) и, кроме того, в местах соприкосновения колес с Землей на него действуют реакции связей, равные и противоположные давлениям в этих местах со стороны самолета на Землю. На рисунке показаны только силы, действующие на самолет. Силы давления самолета на Землю не изображены. Изучая в статике систему сил, действующих на какое-либо тело, ни в коем случае не следует вносить в эту систему и те силы, с которыми данное тело действует на окружающие тела и, в частности, на связи, потому что эти силы действуют не на данное тело, а на другие тела. В этом примере (см. рис. 6) мы изучаем равновесие системы сил, действующих на самолет, и учитываем вес G самолета, т. е. силу, с которой он притягивается к центру Земли, но, разумеется, не учитываем противодействия этой силе, т. е. силу, с которой самолет притягивает к себе Землю. Точно так же мы не учитываем здесь давлений самолета на аэродром, потому что эти силы приложены не к самолету, а к аэродрому, но учитываем приложенные к самолету реакции аэродрома R1, R2 и R3. Не всегда бывает просто определить направления реакций связи и для их определения полезно пользоваться понятием «виртуальные перемещения».
Виртуальными перемещениями называют воображаемые бесконечно малые перемещения, допускаемые в данное мгновение наложенными связями без нарушения их
Виртуальные перемещения
Представим себе какое-либо несвободное тело, например тот же самолет (см. рис. 6), стоящий на аэродроме. Дадим мысленно этому телу какое-либо бесконечно малое перемещение. Вообразим, например, что мы немного приподняли самолет над аэродромом; при таком перемещении связь самолета с аэродромом будет нарушена. Но мы можем дать самолету воображаемое перемещение по плоскости аэродрома, которое не нарушает связи. Всякое мысленное бесконечно малое перемещение тела, материальной точки или механической системы, не нарушающее наложенной связи, называют возможным, или виртуальным, перемещением. Так, в нашем примере для самолета виртуальным перемещением является всякое воображаемое бесконечно малое перемещение его по плоскости аэродрома. Перемещение, хотя бы мысленное, самолета над аэродромом не относится к числу виртуальных, так как оно нарушает связь.
Реакция идеальной связи направлена перпендикулярно виртуальным перемещениям
Реакции связи направлены перпендикулярно виртуальным перемещениям. Плоскостью виртуальных перемещений для рассматриваемого самолета является горизонтальная плоскость, реакции же аэродрома на самолет перпендикулярны виртуальным перемещениям, они вертикальны.
Если тело находится на наклонной плоскости (см. рис. 5), то виртуальным его перемещением является перемещение по плоскости, а реакция RN перпендикулярна этой плоскости. Отметим, что, говоря о реакции, мы подразумеваем так называемую идеальную реакцию, а не реакцию с трением, как называют равнодействующую, полученную от сложения идеальной реакции с силой трения. О направлении реакций с трением будет сказано ниже . Реакции связей, осуществляемых в виде нитей и шарниров, будут разобраны ниже в конкретных примерах и задачах.
C понятием связи и с виртуальными перемещениями мы ознакомимся более подробно в главах XIX и XX.
| Рекомендую подробно изучить предмет: |
| Ещё лекции с примерами решения и объяснением: |