
Приведение системы сил к простейшему виду в теоретической механике
Приведение системы сил к простейшему виду:
Постановка задачи. Систему сил, заданную в прямоугольной системе координат, привести к началу координат. Найти точку пересечения центральной винтовой оси с заданной плоскостью.
Привести систему сил к центру О — означает найти главный вектор 
План решения:
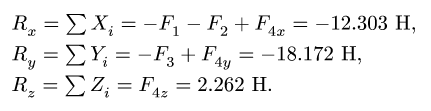
1. Вычисляем компоненты главного вектора системы, составляя суммы проекций всех сил на оси координат:
2. Находим модуль главного вектора 
3. Вычисляем компоненты главного момента системы относительно начала координат:

4. Находим модуль главного момента 
5. Определяем скалярный инвариант системы. Система сил имеет две величины, не меняющиеся при перемене центра приведения (инварианты) — главный вектор и скалярное произведение главного вектора на главный момент:
Если  то система сил приводится к равнодействующей.
то система сил приводится к равнодействующей.
6. Находим минимальный главный момент  Проверяем неравенство
Проверяем неравенство  Если
Если  то задача решена — система приводится к паре (или уравновешена, если и
то задача решена — система приводится к паре (или уравновешена, если и 
7. Вычисляем шаг винта  Если р < 0, то главный вектор и главный момент направлены по винтовой оси в разные стороны, если р > 0 — в одну сторону, а если р = 0, то система приводится к равнодействующей.
Если р < 0, то главный вектор и главный момент направлены по винтовой оси в разные стороны, если р > 0 — в одну сторону, а если р = 0, то система приводится к равнодействующей.
8. Записываем уравнения центральной винтовой оси

Индексы в уравнениях образуют круговую перестановку 
Если систему привести к любой точке на центральной винтовой оси, то главный вектор и главный момент будут лежать на этой оси и образовывать динаму.
Из трех уравнений (1) два являются независимыми.
Если один из компонентов главного вектора равен нулю, например,  , то соответствующее уравнение записывается в другой форме:
, то соответствующее уравнение записывается в другой форме: 
9. Находим координаты точки А пересечения центральной оси с плоскостью ху . Если прямая параллельна плоскости ху, то такой точки не существует. Решая систему (1) при z = 0, получаем Аналогично можно найти точки пересечения центральной винтовой оси с плоскостями
Аналогично можно найти точки пересечения центральной винтовой оси с плоскостями  (если они существуют).
(если они существуют).
10. Проверяем решение, приводя систему к любой точке центральной винтовой оси (например,  ). Для этого новые оси координат, параллельные старым, проводим через выбранную точку и повторяем пп. 3-4 плана. Главный момент должен быть равен минимальному
). Для этого новые оси координат, параллельные старым, проводим через выбранную точку и повторяем пп. 3-4 плана. Главный момент должен быть равен минимальному 
Задача:
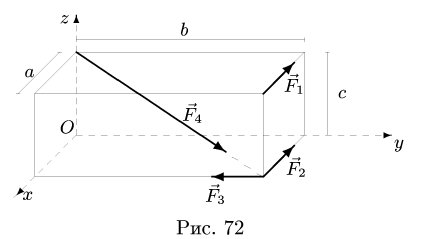
Систему сил  приложенных к вершинам параллелепипеда, привести к началу координат (рис. 72). Найти координаты точки пересечения центральной винтовой оси с плоскостью
приложенных к вершинам параллелепипеда, привести к началу координат (рис. 72). Найти координаты точки пересечения центральной винтовой оси с плоскостью 
Решение
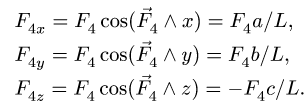
1. Вычисляем компоненты главного вектора системы. Проекции вектора , лежащего на большой диагонали параллелограмма длиной
, лежащего на большой диагонали параллелограмма длиной  вычисляем по формулам
вычисляем по формулам
Определяем компоненты главного вектора:
2. Находим модуль главного вектора:

3. Вычисляем компоненты главного момента системы сил относительно начала координат:
4. Находим модуль главного момента:

8 М.Н. Кирсанов
Гл. 4. Пространственная система сил
5. Определяем скалярный инвариант системы:

Скалярный инвариант не равен нулю, следовательно, система сил приводится к динаме.
6. Вычисляем минимальный главный момент системы сил:

Неравенство Нм выполняется. Точки, относительно которой момент системы сил меньше
Нм выполняется. Точки, относительно которой момент системы сил меньше , не существует.
, не существует.
7. Находим шаг винта системы сил:
Шаг положительный, следовательно, главный момент и главный вектор направлены по центральной винтовой оси в одну сторону.
8. Записываем уравнения центральной винтовой оси:

Из этих трех уравнений только два являются независимыми:

9. Находим координаты точки пересечения центральной оси с плоскостью ху. Решая систему (2) при z = 0, получаем, что

Основные результаты расчета заносим в таблицу:
10. Проверяем решение, приводя систему к точке А центральной винтовой оси. Через точку А проводим оси новой системы координат  параллельные исходным осям (рис. 73).
параллельные исходным осям (рис. 73).
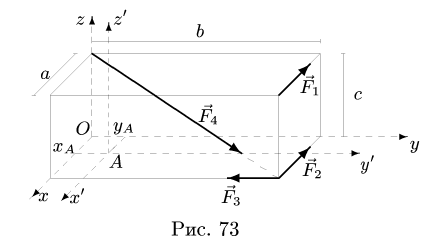
Получаем моменты заданной системы относительно новых осей координат и величину главного момента относительно центра А:
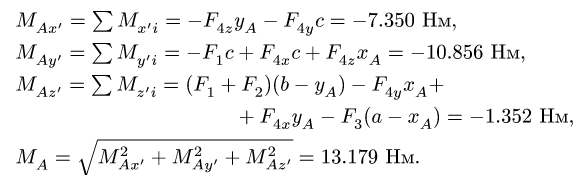
Главный момент системы  относительно новой точки приведения совпадает с полученным ранее минимальным
относительно новой точки приведения совпадает с полученным ранее минимальным  что подтверждает правильность расчетов.
что подтверждает правильность расчетов.
Замечание. Решение задачи легко проверить в системе Maple V. Приведем фрагмент программы вычислений * *.
Введены следующие обозначения: F[l] —сила Т[1] —радиус-вектор точки приложения силы
Т[1] —радиус-вектор точки приложения силы  — главный вектор, М — главный момент,
— главный вектор, М — главный момент,  — скалярный инвариант.
— скалярный инвариант.
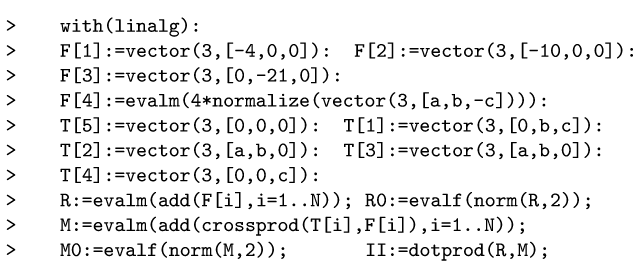
Здесь использована библиотека linalg. В последних версиях Maple 6,7,8 существует более совершенный пакет LinearAlgebra. В этом случае операторы скалярного и векторного произведения необходимо заменить соответственно на DotProduct и CrossProduct.
| Рекомендую подробно изучить предмет: |
| Ещё лекции с примерами решения и объяснением: |