
Плоскопараллельное движение тела в теоретической механике
Плоскопараллельное движение тела:
Сложное плоскопараллельное движение твердого тела составляется из поступательного и вращательного движений. Это свойство является основой первого способа определения скорости любой точки тела, находящегося в плоскопараллельном движении.
1. Поступательная часть плоскопараллельного движения принимается за переносное и зависит от движения какой-либо произвольно выбранной точки, называемой полюсом. За полюс принимают всегда ту точку, скорость которой в данный момент известна.
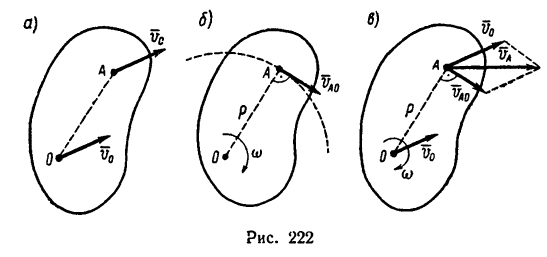
Если движение является только поступательным, то все точки тела, в том числе и точка А (рис. 222, а), имеют ту же скорость, что и полюс О.
2. Вращательная часть плоскопараллельного движения вокруг выбранного полюса принимается за относительное.
Если движение тела является только вращательным, то точка А совершает движение по окружности с центром в полюсе О со скоростью
3. Абсолютная скорость  точки А равна геометрической сумме переносной скорости полюса
точки А равна геометрической сумме переносной скорости полюса  и ее относительной скорости
и ее относительной скорости  вокруг полюса О (рис. 222, в). Таким образом, абсолютная скорость определяется либо при помощи правила параллелограмма, либо правила треугольника.
вокруг полюса О (рис. 222, в). Таким образом, абсолютная скорость определяется либо при помощи правила параллелограмма, либо правила треугольника.
Второй способ определения скорости любой точки тела при его плоскопараллельным движении основан на использовании в качестве полюса мгновенного центра скоростей.
1. Как известно, мгновенным центром скоростей называется расположенная в плоскости сечения точка, абсолютная скорость которой в данный момент равняется нулю.
2. Если за полюс принять мгновенный центр скоростей, то в этот момент переносные (поступательные) скорости всех точек тела равны нулю и абсолютная скорость любой точки определяется по формуле

где  —угловая скорость плоского сечения, которая не зависит от выбора полюса;
—угловая скорость плоского сечения, которая не зависит от выбора полюса;
р—расстояние от мгновенного центра скоростей С до данной точки (рис. 223).
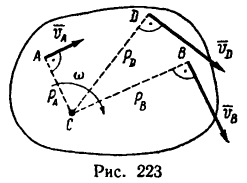
Для скоростей любых точек сечения имеем зависимость
В приведенных решениях задач -показаны оба способа. При самостоятельном решении задач можно использовать любой из двух.
При решении некоторых задач оказывается целесообразным использовать теорему о равенстве между собой проекций скоростей двух точек плоского сечения на прямую, соединяющую эти точки.
Задача №1
Стержень АВ двигается в плоскости чертежа. В момент, когда стержень занимает горизонтальное положение (рис. 224, а), скорость его точки А равна 2 м/сек и направлена под углом а=60° к прямой АВ. Определить скорость точки В, если известно, что она направлена вдоль АВ.
Решение 1—сложение переносной и относительной скоростей (рис. 224, б).
1. Примем за полюс точку А. Вместе с полюсом стержень АВ движется поступательно, поэтому точка В как слагаемая скорость имеет скорость полюса, т. е.  которую изобразим у точки В вектором ВК
которую изобразим у точки В вектором ВК
2. Вследствие вращения стержня вокруг полюса точка В имеет вторую слагаемую скорость  — относительную скорость, направленную перпендикулярно к стержню.
— относительную скорость, направленную перпендикулярно к стержню.
3. Построим параллелограмм скоростей. В параллелограмме известно направление диагонали, которая изобразит искомую скорость  поэтому из точки К проведем до пересечения с продолжением АВ отрезок KL, параллельный направлению относительной скорости
поэтому из точки К проведем до пересечения с продолжением АВ отрезок KL, параллельный направлению относительной скорости  Затем из точки L проведем прямую LD, параллельную КВ (или вектору
Затем из точки L проведем прямую LD, параллельную КВ (или вектору  , до пересечения в точке D с линией, характеризующей направление
, до пересечения в точке D с линией, характеризующей направление  Получается параллелограмм BKLD, в котором диагональ BL изображает
Получается параллелограмм BKLD, в котором диагональ BL изображает  —скорость точки В.
—скорость точки В.
4. Находим числовое значение 
 BLK —прямоугольный (KL
BLK —прямоугольный (KL  BL), поэтому
BL), поэтому

Решение 2 — при помощи мгновенного центра скоростей (рис. 224, в).
1. Из точек А и В проведем две прямые, перпендикулярные к направлениям скоростей  Точка С пересечения этих прямых и определит положение мгновенного центра скоростей.
Точка С пересечения этих прямых и определит положение мгновенного центра скоростей.
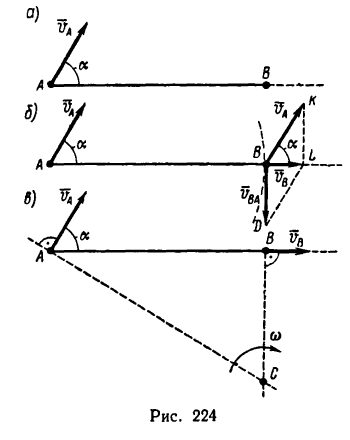
2. Вращение стержня АВ вокруг мгновенного центра скохарактеризуется угловой скоростью 
Поэтому
Отсюда
Решение 3—с применением теоремы о проекциях скоростей двух точек плоского сечения.
1. В рассматриваемом случае искомая скорость  направлена вдоль прямой, соединяющей точки A и В; при этом известен угол между данной скоростью
направлена вдоль прямой, соединяющей точки A и В; при этом известен угол между данной скоростью  и той же прямой АВ. Поэтому удобно применить теорему: проекции скоростей двух точек плоского сечения на прямую, соединяющую эти точки, равны между собой.
и той же прямой АВ. Поэтому удобно применить теорему: проекции скоростей двух точек плоского сечения на прямую, соединяющую эти точки, равны между собой.
2. Спроектировав данную скорость  и искомую
и искомую  на прямую АВ (см. рис. 224, в) и приравняв эти проекции, получим
на прямую АВ (см. рис. 224, в) и приравняв эти проекции, получим
При решении подобных задач иногда приходится выполнять довольно много промежуточных вычислений. Их можно избежать, если решить задачу графическим методом, но с приближенным результатом.
Поясним это на примере следующей задачи.
Задача №2
Кривошип  кривошипно шатунного механизма (рис. 225, а) вращается с угловой скоростью
кривошипно шатунного механизма (рис. 225, а) вращается с угловой скоростью = 25 рад/сек. Длина шатуна, приводящего ползун В в возвратно-поступательное движение вдоль горнтальных направляющих, равна
= 25 рад/сек. Длина шатуна, приводящего ползун В в возвратно-поступательное движение вдоль горнтальных направляющих, равна  Определить скорость ползуна В в тот момент, когда ОА образует с горнзонталью угол а = 30°.
Определить скорость ползуна В в тот момент, когда ОА образует с горнзонталью угол а = 30°.
Решение 1 — при помощи мгновенного центра скоростей (решение путем сложения переносной и относительной скоростей рекомендуется выполнить самостоятельно).
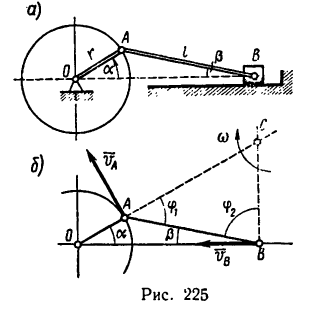
1. Изобразим на рис. 225, б расчетную схему. Схематично покажем кривошип ОА и шатун АВ в заданном положении. Ползун В, можно отождествить с точкой В.
2. Замечаем, что кривошип cobcj ползун В движется поступательно, ■ параллельное движение.
3. Скорость точки А направлю шипу 0/1 (по касательной к окр точка А). Ее числовое значение
точки А направлю шипу 0/1 (по касательной к окр точка А). Ее числовое значение

Скорость  точки В направлена
точки В направлена
Проведем из точек А и В пря правлениям скоростей  Пай мгновенный центр скоростей шатунг
Пай мгновенный центр скоростей шатунг
4. Найдя положение мгновенноп центра скоростей, получим = 0).
Отсюда
но предварительно нужно узнать значение отношения  которое,
которое,
как легко заметить, равно отношению синусов противолежащих углов (теорема синусов):
5. Чтобы определить величину этого отношения, необходимо определить углы 
Замечая, что (см. рис. 225, б)
найдем угол  применив теорему синусов к
применив теорему синусов к 
Из того же рис. 225, б видно, что угол  является одним из внешних углов
является одним из внешних углов  ОВА, поэтому
ОВА, поэтому

6. Теперь можно определить числовое значение скорости ползуна В:

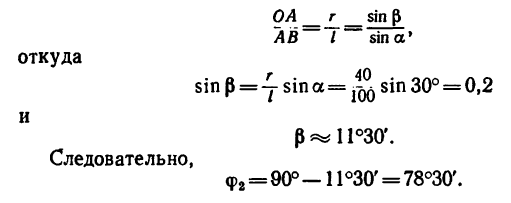
Решение 2—графическим методом.
1. Построим в масштабе =2,22 см/мм схему кривошипношатунного механизма в заданном положении (рис. 226).
=2,22 см/мм схему кривошипношатунного механизма в заданном положении (рис. 226).
2. Скорость  = 10 м/сек точки А изобразим отрезком АК =18 мм. Значит масштаб скоростей
= 10 м/сек точки А изобразим отрезком АК =18 мм. Значит масштаб скоростей

3. Из точки В построим вектор  (вектор ВЬ равен вектору
(вектор ВЬ равен вектору  и параллелен отрезку АК)- Из точки b построим до пересечения с линией ВО (направлением скорости
и параллелен отрезку АК)- Из точки b построим до пересечения с линией ВО (направлением скорости  отрезок bа, перпендикулярный к- ВА. Получившийся на линии ВО вектор Ва изображает искомую скорость
отрезок bа, перпендикулярный к- ВА. Получившийся на линии ВО вектор Ва изображает искомую скорость 
4. Измерив длину отрезка Ва, найдем, что Ва — 12 мм. Следовательно, числовое значение скоростей точки В

5. Как видно, между результатом, вычисленным при помощи мгновенного центра скоростей (6,75), и результатом, найденным при графическом решении (6,66), имеется расхождение, равное
0,09 (абсолютная ошибка). Следовательно, относительная ошибка, допущенная в графическом решении, составляет
Задача №3
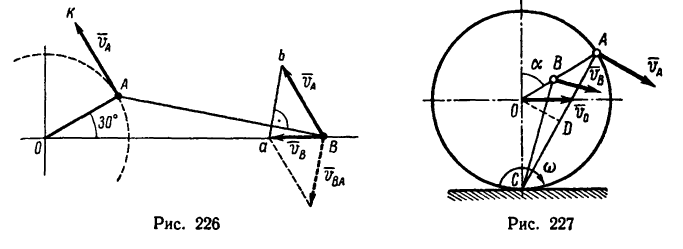
Колесо катится без скольжения по горизонтальной плоскости, причем ось колеса перемещается равномерно со скоростью  = 5 м/сек. Определить абсолютную скорость точки А на ободе колеса и точки В, находящейся на том же радиусе, в момент, когда радиус колеса, равный ОА = г=40 см, образует с вертикалью угол а=60° (рис. 227). Расстояние ОВ = 15 см.
= 5 м/сек. Определить абсолютную скорость точки А на ободе колеса и точки В, находящейся на том же радиусе, в момент, когда радиус колеса, равный ОА = г=40 см, образует с вертикалью угол а=60° (рис. 227). Расстояние ОВ = 15 см.
Решение 1—при помощи мгновенного центра скоростей.
1. Колесо катится без скольжения, следовательно, точка С соприкосновения колеса с горизонтальной плоскостью является мгновенным центром скоростей, так как абсолютная скорость этой точки ос=0 Если принять точку С за полюс, то можно считать, что в данный момент колесо совершает вращение вокруг так называемой мгновенной оси, перпендикулярной к плоскости колеса и проходящей через точку С (мгновенный центр скоростей).
2. Определяем угловую скорость колеса:

3. Определяем абсолютную скорость точки А. Скорость направлена перпендикулярно к прямой АС, соединяющей точку А с мгновенным центром скоростей С,
Но

Следовательно,

4. Определяем абсолютную скорость точки В. Скорость у0 направлена перпендикулярно к примой СВ и численно равна
Но
и, следовательно,

Решение 2 —при помощи сложения переносной и относительной скоростей.
1. Катящееся колесо совершает сложное движение, складывающееся из поступательного движения колеса вместе с осью О (переносного движения) и вращения колеса вокруг оси О (относительного движения).
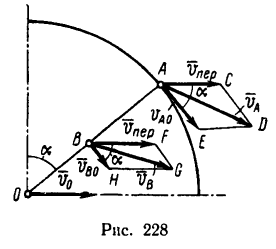
2. Абсолютная скорость  точки А при таком рассмотрении движения колеса равна диагонали параллелограмма ACDE, построенного на переносной
точки А при таком рассмотрении движения колеса равна диагонали параллелограмма ACDE, построенного на переносной  и относительной
и относительной  скоростях точки А (рис. 228).
скоростях точки А (рис. 228).
3. Переносная скорость точки А равна скорости  колеса.
колеса.
Найдем относительную скорость
 точки А;
точки А;  Но угловая скорость относительного вращательного движения, как известно, не зависит от выбора полюса, поэтому, приняв за полюс
Но угловая скорость относительного вращательного движения, как известно, не зависит от выбора полюса, поэтому, приняв за полюс
точку С (см. рис. 227), найдем, что  Следовательно, с
Следовательно, с
 (так как СО = АО — радиус колеса).
(так как СО = АО — радиус колеса).
Таким образом, для точки, расположенной на ободе катящегося без скольжения колеса,

^пер — Vao === Последовательно, параллелограмм ACDE есть ромб с углом САЕ = а = 60°, поэтому

4. Абсолютная скорость vB точки В равна диагонали параллелограмма BFGH, построенного на переносной скорости  и па относительной скорости
и па относительной скорости  и ее числовое значение можно определить по формуле
и ее числовое значение можно определить по формуле

Но предварительно необходимо найти скорость  которая определяется из соотношения
которая определяется из соотношения
Окончательно

Задача №4
Две параллельные рейки (рис. 229, а) движутся в противоположные стороны с постоянными скоростями  = 8 м/сек и
= 8 м/сек и  = 2 м/сек. Между рейками зажат диск радиусом r = 0,5 м, катящийся по рейкам без скольжения.
= 2 м/сек. Между рейками зажат диск радиусом r = 0,5 м, катящийся по рейкам без скольжения.
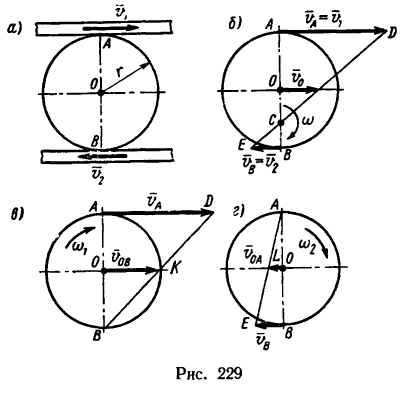
Найти угловую скорость диска и скорость его центра.
Решение 1— при помощи мгновенного центра скоростей.
1. В данном случае известны скорости реек. Но так как диск катится между ними без скольжения, точки А и В в местах соприкосновения диска с рейками имеют те же скорости. Следовательно, 
 Как видно, точки А и В лежат на прямой, перпендикулярной к направлениям этих скоростей. Соединив концы D и E векторов AD и BE, изображающих скорости
Как видно, точки А и В лежат на прямой, перпендикулярной к направлениям этих скоростей. Соединив концы D и E векторов AD и BE, изображающих скорости  найдем на прямой АВ точку С - мгновенный центр скоростей диска.
найдем на прямой АВ точку С - мгновенный центр скоростей диска.
2. Скорость  центра диска определяется по формуле
центра диска определяется по формуле
где  — угловая скорость диска.
— угловая скорость диска.
3. Величины угловой скорости  и расстояния ОС находим из равенств:
и расстояния ОС находим из равенств:

Так как левые части обоих равенств равны между собой, то
4. Находим скорость 

Решение 2—методом последовательной остановки реек.
1. Плоское движение диска образуется вследствие независим мого друг от друга перемещения реек. Поэтому скорость центра диска можно получить как результат геометрического сложения скоростей, получаемых точкой О от перемещения каждой рейки.
2. Мысленно остановим нижнюю рейку (рис. 229,в). Тогда благодаря передвижению верхней рейки диск будет катиться по нижней без скольжения и в точке В образуется мгновенный центр скоростей.
Соединим точку В с точкой D (концом вектора  и получим треугольник BAD, в котором вектор
и получим треугольник BAD, в котором вектор  изображает скорость центра диска при неподвижной нижней рейке.
изображает скорость центра диска при неподвижной нижней рейке.
Так как ОК — средняя линия треугольника BAD,
Угловая скорость диска в этом движении
3. Теперь мысленно остановим верхнюю рейку (рис. 229 г). Диск будет катиться без скольжения по верхней рейке, имея мгновенный центр скоростей в точке А.
Соединив точку А с концом Е вектора  получим треугольник АВЕ, определяющий скорость
получим треугольник АВЕ, определяющий скорость  центра диска при неподвижной верхней рейке.
центра диска при неподвижной верхней рейке.
И здесь OL - средняя линия треугольника АВЕ, поэтому
Угловая скорость диска в этом движении

4. При одновременном движении обеих реек скорость центра диска

так как обе скорости  направлены вдоль одной прямой, но в противоположные стороны.
направлены вдоль одной прямой, но в противоположные стороны.
5. Угловая скорость диска определяется как сумма угловых скоростей найденных выше:
найденных выше:

| Рекомендую подробно изучить предмет: |
| Ещё лекции с примерами решения и объяснением: |
- Определение передаточных отношений различных передач
- Задачи на поступательное движение тела
- Задачи на вращательное движение тела
- Равновесие тяжелой рамы
- Кинематический способ определения радиуса кривизны траектории
- Равномерное вращательное движение
- Равнопеременное вращательное движение
- Неравномерное вращательное движение