
Электромеханические аналогии
Электромеханические аналогии:
Явления, исследуемые на основе законов физики, описываются математически при помощи систем уравнений. Исходя из единства уравнений, соответствующих некоторым двум явлениям, происходящим в различных областях, например в электрической цепи и механической системе, можно установить аналогию между этими явлениями. «Единство природы обнаруживается в «поразительной аналогичности» дифференциальных уравнений, относящихся к различным областям явлений»
Благодаря единству уравнений электрических и механических систем исследование явлений в механической системе может быть заменено исследованием процессов в электрической цепи. Выполнение электрических цепей обычно сопряжено с меньшими трудностями, чем выполнение механических систем; они более компактны и, что особенно важно, измерения в них более точны и удобны. Процессы в электромеханических системах, представляющих совокупность электрических и механических устройств, также могут с успехом исследоваться с помощью электромеханических аналогий.
Механические системы с сосредоточенными параметрами, которые по аналогии с электрическими цепями будем называть механическими цепями, состоят из активных элементов (источников энергии) и пассивных элементов.
Рассмотрим идеализированные элементы простейших линейных механических цепей, совершающих поступательное или вращательное движение (комбинированное поступательно-вращательное движение опустим).
В случае поступательного движения заданная внешняя сила, приложенная к цепи, рассматривается как источник силы, а заданная скорость какой-либо точки цепи — как источник скорости.
В случае вращательного движения заданный вращающий момент, приложенный к цепи, рассматривается как источник момента, а заданная угловая скорость какой-либо точки — как источник угловой скорости .
Роль пассивных элементов в механических цепях выполняют массы, моменты инерции, пружины и механические (демпфирующие) сопротивления.
Массой называется идеализированный элемент механической цепи, обладающий инерцией. В нем накапливается кинетическая энергия. При этом термин «масса» и соответствующее ему условное обозначение т применяются для обозначения как самого инерционного элемента, так и его количественной характеристики. Сила F (ньютон — H), приложенная к центру тяжести свободного твердого тела, сообщает ему линейную скорость 
На вращение тела влияет не только масса, но и распределение ее относительно оси вращения. Поэтому вращающийся инерционный элемент характеризуется моментом инерции  — радиус инерции тела относительно оси вращения. Это пассивный элемент, в котором накапливается кинетическая энергия вращения.
— радиус инерции тела относительно оси вращения. Это пассивный элемент, в котором накапливается кинетическая энергия вращения.
Момент  приложенный к свободному твердому телу, сообщает ему угловую скорость со (рад/с) и угловое ускорение
приложенный к свободному твердому телу, сообщает ему угловую скорость со (рад/с) и угловое ускорение  Если момент инерции постоянен, то
Если момент инерции постоянен, то
 (7-34)
(7-34)
т. е. момент инерции  представляет собой коэффициент пропорциональности между моментом и угловым ускорением.
представляет собой коэффициент пропорциональности между моментом и угловым ускорением.
Кинетическая энергия поступательного движения равна  а кинетическая энергия вращательного движения
а кинетическая энергия вращательного движения  (Дж).
(Дж).
Пружина играет роль пассивного элемента, в котором накапливается потенциальная энергия, Сила натяжения или давления, развиваемая соответственно растянутой или сжатой пружиной при данном относительном перемещении х (м) ее конца, пропорциональна ее жесткости К, измеряемой в 
Сила F, необходимая для относительного перемещения х конца пружины, действует вдоль оси х и равна по закону Гука:

Продифференцировав обе части уравнения, получим:

Величина, обратная К, называется податливостью пружины. Момент, необходимый для создания углового перемещения  конца пружины, подвергающейся скручиванию, пропорционален жесткости К
конца пружины, подвергающейся скручиванию, пропорционален жесткости К 
откуда

В этом случае коэффициент пропорциональности  называется податливостью при кручении.
называется податливостью при кручении.
Потенциальная энергия при растяжении или сжатии пружины равна  а потенциальная энергия при скручивании
а потенциальная энергия при скручивании (Дж).
(Дж).
Демпфирующее механическое сопротивление создается вязким трением. Вследствие механического сопротивления происходит необратимый процесс преобразования кинетической энергии в тепло.
В линейной механической цепи с поступательным движением сила трения пропорциональна первой степени относительной скорости точек, принадлежащих трущимся поверхностям:

где f—коэффициент трения
При вращательном движении момент силы трения пропорционален первой степени относительной угловой скорости:

В этом случае коэффициент трения f измеряется в

Мощность, расходуемая на трение, равна при поступательном движении  а при вращательном
а при вращательном 
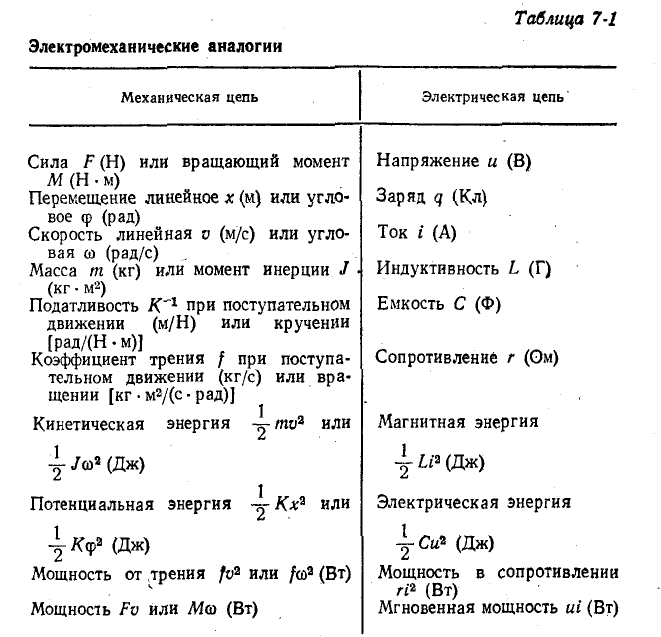
Сопоставление уравнений (7-33) — (7-38) с уравнениями элементов электрических цепей

показывает, что механическая сила и вращающий момент соответствуют напряжению, линейная и угловая скорости — юку, масса и момент инерции — индуктивности, податливость пружины — емкости, механическое сопротивление — сопротивлению,
На рис. 7-29 приведены изображения пассивных элементов механической цепи с поступательным движением и показаны их электрические аналоги.
и показаны их электрические аналоги.
Рассмотренная система электромеханических аналогий, сведенная в табл. 7-1, не является единственной. Взяв дуальную электрическую цепь, можно заключить, что механическая сила и вращающий момент соответствуют току, линейная и угловая скорости — напряжению, Масса и момент инерции — емкости, податливость пружины — индуктивности, механическое сопротивление — проводимости.
Дифференциальные уравнения движения механической цепи могут быть выведены на основе второго закона Ньютона, который для поступательного движения гласит: если на тело действует несколько сил, то его ускорение совпадает по направлению с равнодействующей этих сил и пропорционально отношению последней к массе тела.

Для вращательного движения применяется следующая формулировка второго закона Ньютона: если относительно оси вращения тела действует несколько моментов, то его угловое ускорение относительно той же оси пропорционально отношению результирующего момента к моменту инерции тела.
Дифференциальные уравнения движения механической цепи могут быть также получены на основании принципа Даламбера: при движении тела действующие на него силы и сила инерции удовлетворяют уравнению равновесия сил.
Уравнения такого же типа, получаемые для электрических цепей на основании законов Кирхгофа, могут быть либо уравнениями напряжений, либо уравнениями токов.
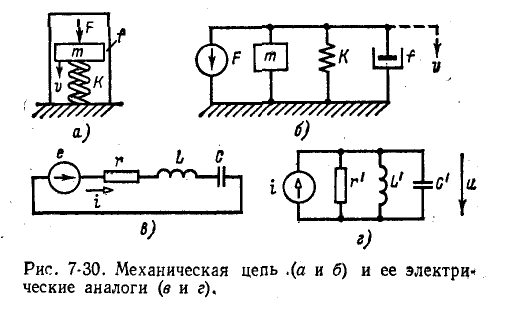
В качестве примера рассмотрим простейшую механическую систему: масса ш находится под воздействием силы F и опирается на пружину (рис, 7-30, а). Тело движется между неподвижными направляющими, и между ним и направляющими- возникает вязкое трение, Массой пружины пренебрегаем.
 Механическое сопротивление изображается в виде демпфера.
Механическое сопротивление изображается в виде демпфера.
На рис. 7-30. б изображена схема данной механической цепи. По второму закону Ньютона
или
Пользуясь первой системой электромеханических аналогий (сила — напряжение, табл. 7-1), получаем уравнение электрической цепи, показанной на рис. 7-30, в:
В свою очередь, применив вторую систему аналогий (сила — ток), получим уравнение электрической цепи, показанной на рис, 7-30, г:
Таким образом, можно пользоваться двумя системам» электромеханических аналогий: в одной из них напряжение, а в другой — ток являются аналогом силы или вращающего момента. Две электрические цепи, аналогичные одной и той же механической цепи, являются дуальными, так как контурные токи одной цепи соответствуют узловым напряжениям другой.
Электромеханические аналогии находят практическое применение в электрических моделях.
| Рекомендую подробно изучить предметы: |
| Ещё лекции с примерами решения и объяснением: |
- Индуктивно связанные электрические цепи
- Фильтры и топологические методы анализа линейных электрических цепей
- Электрическое поле и его расчёт
- Расчет неразветвленной однородной магнитной цепи
- Теорема об изменении токов в электрической цепи при изменении сопротивления в одной ветви
- Теорема об эквивалентном источнике
- Применение матриц к расчету электрических цепей
- Дуальные цепи